Страница: Параметрично изравнение на нивелачни мрежи
Връзка: ПИНМ_v1.0.1
Описание:
Програмата служи за параметрично изравнение на нивелачни мрежи по МНМК.
Примерно съдържание на входен файл с дадени репери:
нр2000 470
Примерно съдържание на входен файл с измервания (нивелачни ходове):
нр2000 нр500 0 37 0 нр500 нр600 5 30 0 нр500 нр700 0 54 0 нр500 нр800 5.0001 82 0 нр600 нр700 -5 30 0 нр600 нр800 0.0000 54 0 нр700 нр800 5 31 0 нр800 нр450 -5.0003 693 0 нр450 нр250 0 35 0 нр450 нр350 5 30 0 нр450 нр150 4.999 70 0 нр250 нр350 4.9999 34 0 нр250 нр150 5 51 0 нр350 нр150 0.0001 42 0
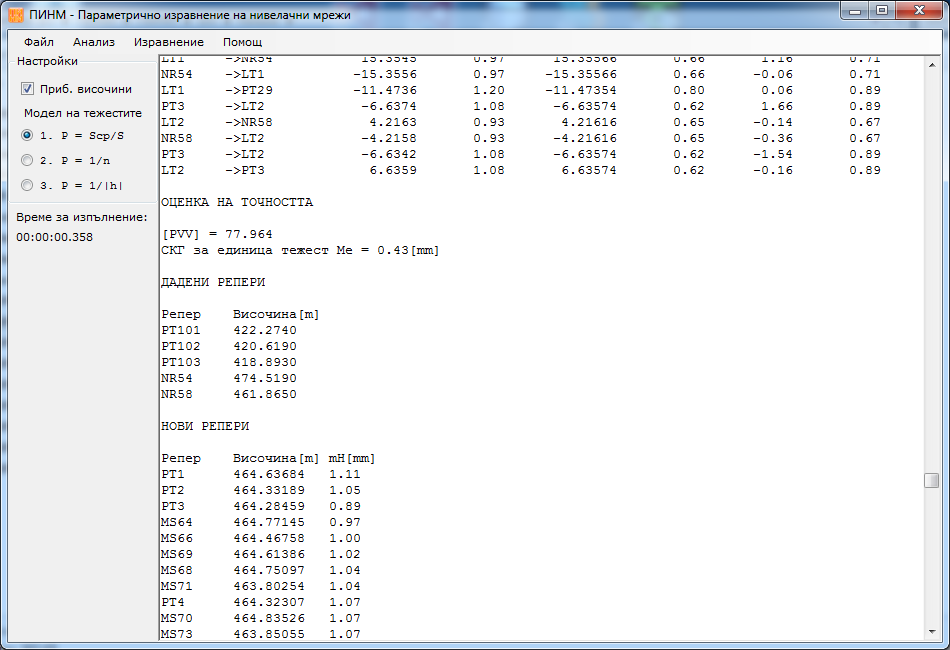
Примерен резултат след изравнение на мрежата:
ПАРАМЕТРИЧНО ИЗРАВНЕНИЕ НА НИВЕЛАЧНА МРЕЖА Неизвестни (Параметри) = [8]; Измервания (Уравнения) = [14]; Свръхизмервания = [6]; Дадени репери = [1]; ИЗЧИСЛЯВАНЕ НА ПРИБЛИЗИТЕЛНИТЕ ВИСОЧИНИ НА НОВИТЕ РЕПЕРИ Приблизителна височина на нр500 = 470.000[m], изчислена от нр2000 Приблизителна височина на нр600 = 475.000[m], изчислена от нр500 Приблизителна височина на нр700 = 470.000[m], изчислена от нр500 Приблизителна височина на нр800 = 475.000[m], изчислена от нр500 Приблизителна височина на нр450 = 470.000[m], изчислена от нр800 Приблизителна височина на нр250 = 470.000[m], изчислена от нр450 Приблизителна височина на нр350 = 475.000[m], изчислена от нр450 Приблизителна височина на нр150 = 474.999[m], изчислена от нр450 РЕЗУЛТАТ ОТ ИЗРАВНЕНИЕТО Нивелачен ход Изм. прев.[m] mh[mm] Изр. прев.[m] mh[mm] v[mm] mv[mm] нр2000 ->нр500 0.0000 0.25 0.00000 0.25 0.00 0.00 нр500 ->нр600 5.0000 0.23 5.00001 0.18 0.01 0.14 нр500 ->нр700 0.0000 0.31 0.00002 0.20 0.02 0.23 нр500 ->нр800 5.0001 0.38 5.00003 0.22 -0.07 0.31 нр600 ->нр700 -5.0000 0.23 -5.00000 0.17 0.00 0.15 нр600 ->нр800 0.0000 0.31 0.00002 0.20 0.02 0.23 нр700 ->нр800 5.0000 0.23 5.00001 0.18 0.01 0.14 нр800 ->нр450 -5.0003 1.09 -5.00030 1.09 0.00 0.00 нр450 ->нр250 0.0000 0.25 -0.00012 0.18 -0.12 0.17 нр450 ->нр350 5.0000 0.23 4.99981 0.17 -0.19 0.15 нр450 ->нр150 4.9990 0.35 4.99968 0.21 0.68 0.28 нр250 ->нр350 4.9999 0.24 4.99993 0.18 0.03 0.17 нр250 ->нр150 5.0000 0.30 4.99979 0.20 -0.21 0.22 нр350 ->нр150 0.0001 0.27 -0.00013 0.19 -0.23 0.19 ОЦЕНКА НА ТОЧНОСТТА [PVV] = 0.943 СКГ за единица тежест Me = 0.40[mm] ДАДЕНИ РЕПЕРИ Репер Височина[m] нр2000 470.0000 НОВИ РЕПЕРИ Репер Височина[m] mH[mm] нр500 470.00000 0.25 нр600 475.00001 0.31 нр700 470.00002 0.32 нр800 475.00003 0.33 нр450 469.99973 1.14 нр250 469.99962 1.16 нр350 474.99954 1.16 нр150 474.99941 1.16